유리벽 달라붙고 초당 120번의 날갯짓…도마뱀·파리 등 움직임에서 실마리
| |
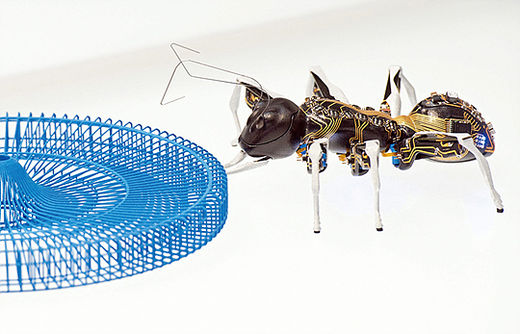
(사진) 페스토(FESTO)가 개발한 개미 로봇 바이오닉 앤츠(Bionic ANTs)./ 연합뉴스
[전승우 LG경제연구원 책임연구원] 인간보다 월등히 뛰어난 능력을 지닌 생명체의 움직임은 언제나 인간의 주요 연구 대상이었다. 칼·도끼·활 등 원초적인 도구에서부터 비행기나 잠수함 등 첨단 기기에 이르기까지 여러 발명이 탄생하는 과정에서 생명체의 관찰 및 모방이 크게 기여했다.
따라서 생체 모방은 생명체의 작동 메커니즘을 정확하게 이해하고 이를 토대로 실제와 거의 동일하거나 혹은 더 나은 성능을 구현하는 것을 목표로 한다. 다양한 과학 분야에서 생체 모방 시도가 계속되고 있는 가운데, 특히 ‘생체 모방을 기반으로 로봇(Biomimetic robot)’을 만들려는 연구 활동이 큰 관심을 끌고 있다.
생체모방로봇이 각광받는 이유는 기존 로봇의 기능적 한계를 극복할 수 있는 가능성을 보여 줬기 때문이다. 바퀴를 사용해 이동하거나 제한된 동작만을 수행할 수 있는 팔다리를 가진 로봇은 고난도 작업 환경 적응력이 떨어진다.
하지만 생명체의 고유한 특성은 생존 활동에 최적화됐기 때문에 기존 로봇 기술이 풀기 어려운 문제 해결의 실마리를 줄 수 있다.
◆ 새로운 기술혁신 방법론으로 ‘주목’
그동안 꾸준한 연구를 토대로 생명체에 대한 신비가 많이 축적됐음에도 불구하고 예전에는 이를 효과적으로 구현할 수 없었다. 하지만 로봇을 만들 수 있는 정보기술(IT)이 하루가 다르게 발전하면서 이전에는 모방이 어려웠던 분야에서까지 세부적으로 구현할 수 있게 됐다.
게다가 바이오·나노·멤스(MEMS : 미세전자기계시스템) 등 여러 기술이 접목되면서 예전에는 실험실 연구 수준에 그쳤던 생체모방로봇이 이른 시일 내 많은 산업에 적용될 것이라는 전망이 힘을 얻고 있다.
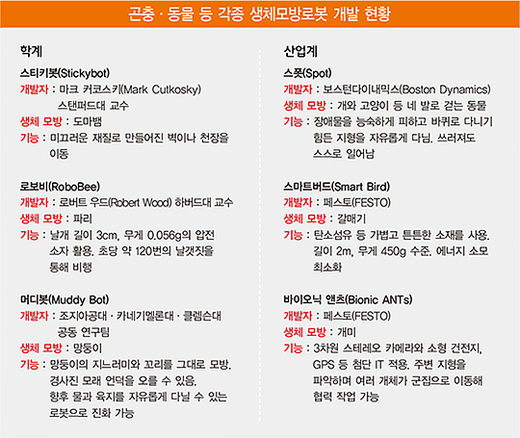
현재 선진국 학계를 중심으로 생체모방로봇 기술이 활발하게 연구되고 있다. 가장 유명한 생체모방로봇 중 하나는 바로 마크 커코스키 스탠퍼드대 교수가 2006년 도마뱀의 움직임을 모방해 개발한 스티키봇(Sticky bot)이다. 도마뱀은 벽에 쉽게 달라붙을 수 있고 천장에 거꾸로 매달린 상태로 이동할 수 있다.
커코스키 교수는 도마뱀이 자유자재로 움직이는 신체의 비밀을 연구했고 이를 그대로 로봇으로 재현했다. 시사 주간지 타임이 2006년 최고의 발명품으로 선정하기도 했던 스티키봇은 이후에도 꾸준한 연구·개발(R&D)을 통해 유리와 대리석 등 미끄러운 재질로 만들어진 벽도 이동할 수 있을 정도로 성능이 발전했다.
로버트 우드 하버드대 교수는 2007년 파리를 닮은 초소형 로봇을 개발했다. 날개 길이 3cm, 무게 0.056g에 불과한 이 로봇은 파리가 날개를 움직이는 방식을 그대로 모방하기 위해 압전 소자를 사용했고 초당 약 120번의 날갯짓을 할 수 있도록 고안됐다.
파리로봇은 유선으로 전기를 공급받고 직진과 수직 상승 정도의 간단한 비행만 할 수 있는 수준이었지만 날개를 퍼덕이면서 비행하는 곤충의 움직임을 정교하게 모방한 로봇이라는 점에서 발표 당시 큰 화제를 모았다.
미국방위고등연구계획국(DARPA)의 지원을 받으며 곤충 로봇 개발을 계속한 그의 연구팀은 2013년, 곤충처럼 자유롭게 비행하다가 벽에 붙어 휴식을 취할 수 있는 로보비(RoboBee)를 선보여 곤충로봇의 새로운 가능성을 보여 줬다.
최근 조지아공대·카네기멜론대·클렘슨대의 공동 연구팀은 물에서 육지로 올라올 수 있는 망둥이를 모사한 머디봇(Muddy Bot)을 개발했다. 망둥이의 지느러미와 꼬리를 그대로 모방한 이 로봇은 망둥이의 동작 메커니즘을 모방해 경사진 모래 언덕을 오를 수 있다.
연구팀은 이 로봇을 활용해 물에서 살던 동물들이 육지로 올라올 수 있게 된 진화의 과정을 연구하는 한편 물과 육지를 자유롭게 다닐 수 있는 로봇을 만들 수 있는 기술도 얻을 수 있을 것으로 기대하고 있다.
상용화까지는 아직 이른 수준이지만 산업계에서도 생체모방로봇에 큰 관심을 보이고 있다. 많은 기업들이 기존 로봇의 문제점을 극복하기 위해 생명체의 원리를 로봇에 적용하는 실험을 계속하고 있다.
특히 인터넷 기업 구글이 인수했지만 최근 매각을 추진 중인 로봇 기업 보스턴다이내믹스는 동물의 움직임을 모방한 여러 종류의 생체모방로봇을 선보이면서 전 세계적으로 화제를 불러일으켰다.
보스턴다이내믹스가 만든 스폿(Spot)이라는 로봇은 개와 고양이 등 네 발로 걷는 동물의 이동 방식을 그대로 모방했다. 스폿은 장애물을 능숙하게 피하고 바퀴로 다니기 힘든 지형을 자유롭게 다닐 수 있고 쓰러져도 스스로 일어나는 것까지 동물의 움직임을 그대로 재현할 수 있다.
또한 보스턴다이내믹스는 마치 사람처럼 두 발로 보행할 수 있고 무거운 물체도 두 팔로 들어 올릴 수 있는 휴머노이드 로봇 아틀라스(Atlas)를 선보이기도 했다.
| |
◆ 동물이나 새처럼 로봇이 넘고, 날고
독일의 전자 부품 기업 페스토 역시 각종 생체모방로봇의 비즈니스 가능성을 타진하고 있는 대표적인 기업이다. 1990년대부터 생체 모방에 관심을 가져 온 페스토는 2011년 갈매기의 비행 움직임을 그대로 모방한 스마트버드(Smart Bird)라는 로봇을 출시했다.
스마트버드는 탄소섬유 등 가볍고 튼튼한 소재를 사용해 날개를 편 길이가 2m나 되지만 무게는 450g 수준으로 가볍다. 또한 갈매기가 하늘을 날 때 움직이는 메커니즘을 그대로 모방해 에너지 소모를 최소화하면서 목적지까지 비행할 수 있도록 제작됐다.
최근 페스토는 개미가 이동하는 메커니즘을 본뜬 곤충로봇인 바이오닉 앤츠(Bionic ANTs)도 선보였다. 3차원 스테레오 카메라와 소형 건전지, 위성항법장치(GPS) 등 첨단 IT가 적용된 바이오닉 앤츠는 주변 지형을 파악하고 동료들과 부딪치지 않게 움직이면서 물체를 나를 수 있다.
게다가 실제 무리를 지어 다니는 개미처럼 여러 개체가 군집으로 이동하면서 협력해 작업을 수행할 수 있다. 페스토는 바이오닉 앤츠를 통해 얻은 기술을 바탕으로 산업 현장에 사용될 수 있는 다양한 협동 로봇을 만들 수 있을 것으로 기대하고 있다.
향후에도 자연의 신비를 이용해 인간이 담당하기 어려운 업무를 수행할 수 있는 로봇을 만들기 위한 노력은 계속될 것으로 보인다.
특히 생명체의 움직임 및 외관 특징을 모방하는 수준을 넘어 고유의 물질 구조 등 고차원의 특성을 연구하고 이를 활용해 새로운 형태의 로봇을 만들려는 시도도 꾸준히 이어질 것으로 예상된다.
따라서 미래에는 움직임은 물론 물질 소재, 인지 및 판단력 등 여러 부문에 걸쳐 생명체를 정교하게 모방할 수 있는 로봇이 등장하게 될 가능성이 높다. 생체모방로봇의 응용 분야는 재난 구조 및 오지 탐사, 정찰과 환자 재활 등 다양하게 확대될 것으로 예상된다.
특히 전 세계적으로 로봇을 만들기 위한 기술 개발 및 서비스 비즈니스가 글로벌 경제의 주요 이슈로 부상하면서 생체모방로봇 관련 시장도 빠르게 확산될 가능성이 높다.
생체모방로봇의 잠재력에 주목한 여러 선진국들은 생체모방로봇의 주도권 확보를 위한 연구·개발에 나서고 있다. 미국·유럽·일본 등 주요 선진국들은 생체모방로봇을 미래 핵심 기술로 선정하고 시장 선점을 위한 각종 기술 개발 및 상용화 활동을 적극적으로 지원하고 있다.
한국과학기술정보연구원(KISTI) 역시 2014년 생체모방로봇을 파급효과가 높은 미래 유망 기술의 하나로 선정하기도 했다.
생체모방로봇은 생물학·물리학·기계·IT·바이오 등 광범위한 과학 및 공학 지식의 융합이 요구되기 때문에 생체모방로봇을 개발하기 위한 학계와 산업계의 공동 대응이 주요 과제로 부각될 것으로 보인다.
한국경제매거진
댓글 없음:
댓글 쓰기