
무한히 뒤집히는 칼레이도사이클.
새로운 도형이 나온 게 얼마 만일까요? 최근 일본에서 연구하는 수학자와 과학자가 뫼비우스 띠와 칼레이도사이클의 특징을 함께 가지고 있는 신기한 도형 ‘뫼비우스 칼레이도사이클’을 만들어 세상을 떠들썩하게 했습니다.
무한히 뒤집히는 ‘칼레이도사이클’
일본 오키나와과학기술대학원대 수학·기계 및 재료과학 연구팀은 지난해 12월 19일 국제학술지 ‘미국립과학원회보’에 ‘뫼비우스 칼레이도사이클’이라는 새 도형을 발표했습니다. 이 도형은 이름에서 알 수 있듯이 뫼비우스 띠와 칼레이도사이클의 성질을 모두 갖고 있습니다.
칼레이도사이클은 그리스어로 ‘아름다운 모양의 고리’라는 뜻을 가지고 있습니다. 사면체 유닛 여러 개가 연결된 모양입니다. 안쪽에서 바깥쪽으로 사면체들을 뒤집으면서 돌릴 수 있다는 것이 특징입니다. 유닛이 삼각형일 때는 ‘플렉사곤’이라고 부릅니다. 유희 수학의 대가인 마틴 가드너가 소개하면서 대중에게 널리 알려졌습니다.
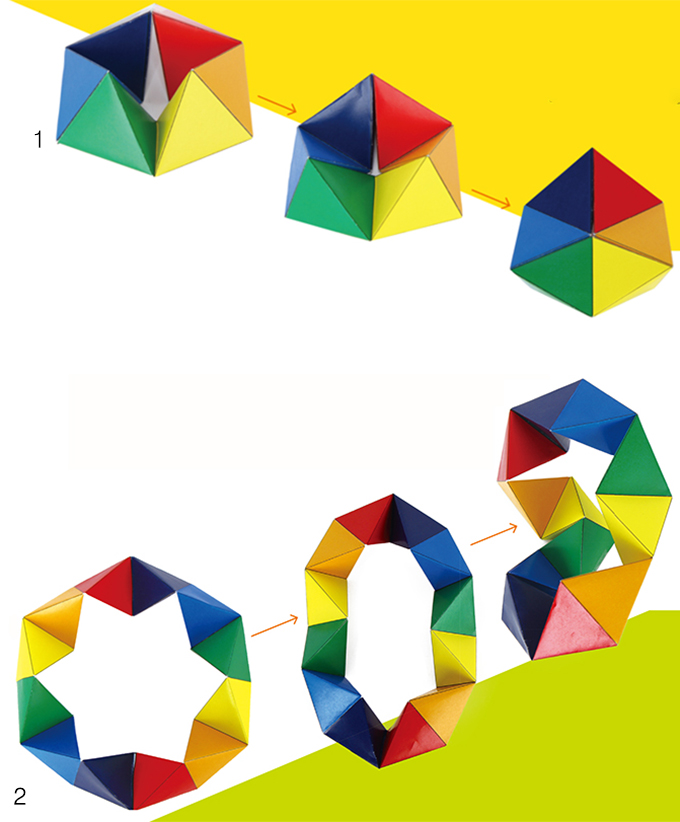
1. 사면체 6개로 이뤄진 대표적인 칼레이도사이클로, 안쪽에서 바깥쪽으로 사면체들이 뒤집힌다. 2. 사면체 12개로 이뤄진 칼레이도사이클은 안팎을 뒤집는 것 외에 다양한 움직임이 가능해 모양이 흐트러지기 쉽다.
칼레이도사이클은 사면체 개수에 따라 모양이 다양한데 사면체 6개로 이뤄진 칼레이도사이클을 주로 사용합니다. 하지만 홀수 사면체로는 칼레이도사이클을 만들 수 없고, 8개 또는 그 이상의 사면체가 만나면 빙글빙글 돌아갈 때 모양이 고정되지 않고 제멋대로 움직입니다. 그래서 로봇팔이나 기계를 만들 때 칼레이도사이클 구조를 사용할 수 없었습니다. 많은 수학자와 과학자가 이 문제점을 해결하기 위해 다양한 시도를 했습니다.
유레카! 뫼비우스 칼레이도사이클!
일본 연구팀의 요하네스 쇤케 연구원과 엘리엇 프라이드 교수는 칼레이도사이클을 변형하기 시작했습니다.
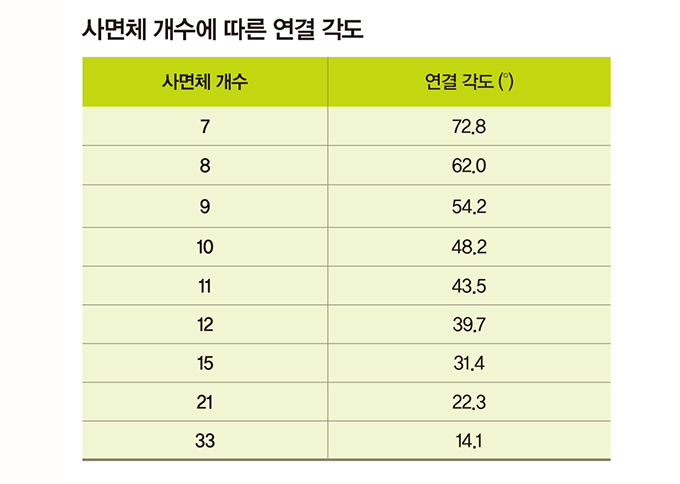
칼레이도사이클의 각 사면체는 90°를 이루며 연결돼 있습니다. 연구팀은 이 각도와 사면체 개수를 바꿨을 때 사면체가 어떻게 연결되는지 알 수 있는 수학 모형을 만들고, 컴퓨터로 시뮬레이션을 해봤습니다. 사면체 개수를 늘려가며 어떤 각도로 연결해야 하는지 따져 본 것입니다.
그 결과 기존 칼레이도사이클은 짝수 개의 사면체로만 만들 수 있었다. 반면, 뫼비우스 칼레이도사이클은 홀수와 짝수에 상관없이 사면체를 연결해 만들 수 있었습니다. 또 절대 도형이 흐트러지지 않았습니다.

사면체 개수를 늘리면 3번 꼬인 뫼비우스 띠가 나타나는 뫼비우스 칼레이도사이클. 엘리엇 프라이드, PNAS 제공
잠깐 왜 이름이 뫼비우스 칼레이도사이클이냐고요? 연구팀은 새로운 칼레이도사이클에 사용하는 사면체 개수를 무한대로 늘리면 3번 꼬인 뫼비우스 띠가 나타나는 것을 우연히 발견했습니다. 의도한 것은 아니지만, 유닛을 연결하는 각도가 90°보다 작아지면서 자연스럽게 뫼비우스 띠처럼 꼬인 칼레이도사이클이 만들어진 것입니다. 또 이 도형은 뫼비우스 띠의 성질을 가지기 때문에 사면체가 제멋대로 움직이지 않고 일정한 움직임을 보였습니다. 뫼비우스 띠는 안과 밖의 구별이 없는 도형입니다. 종이 띠를 비틀어 양쪽 끝을 붙이면 쉽게 만들 수 있어요. 뫼비우스 칼레이도사이클도 마찬가지로 안과 밖의 구별이 없습니다.

뫼비우스 칼레이도사이클의 활용 분야
조규진 서울대 기계항공공학부 교수는 “독특한 구조로 기존 로봇에 바로 쓰이긴 어렵지만, 전동기를 어떻게 연결하느냐에 따라 다양한 분야에 적용할 수 있을 것”이라고 말했습니다. 일본 연구팀이 예상하는 활용 분야는 로봇팔부터 인공위성 태양전지판, 잠수함 프로펠러 등 다양합니다.
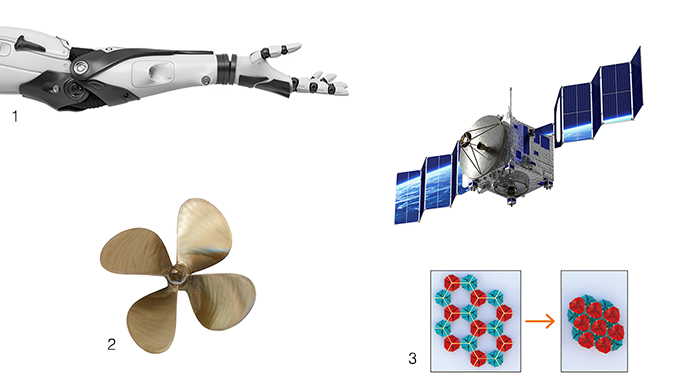
1. 로봇팔과 인공기관의 연결 부분- 안팎으로 자연스럽게 뒤집히는 뫼비우스 칼레이도사이클을 관절로 사용하면 로봇이 자연스럽게 움직일 수 있다. 2. 자동 추진 잠수함의 프로펠러 -뫼비우스 칼레이도사이클은 도형이 뒤집히면서 물을 원하는 방향으로 밀어내 잠수함을 움직이는 프로펠러로 사용할 수 있다. 3. 우주선의 태양광 패널 - 접혔다 넓게 펼쳐지는 우주선의 태양광 패널은 뫼비우스 칼레이도사이클을 여러 개 연결해 조금 더 효과적으로 만들 수 있다.
동아사이언스
댓글 없음:
댓글 쓰기